- 近期网站停站换新具体说明
- 按以上说明时间,延期一周至网站时间26-27左右。具体实施前两天会在此提前通知具体实施时间
主题:【原创】说说 3D 打印那点事 ( 补完) -- kernelh
希望继续看到楼主的后续文章
也许会成为明年holiday season最抢手的礼物哈!觉得很多人家都会买一个打打DYI的艺术陈列品啥的,而且利润空间应该巨大,有做玩具或者打印机的河友一定不要错过了。基本上开源打印机硬件和hot melt glue gun加上必要的运动机件,应该就是几十美元的东西,但卖个爱疯价肯定没问题。外观一定要cool,如果用5个打印头,那么就彩色打印也可能实现,而且如果你程序设计得好,可以让各个打印头在一个平面上同时各打各的,打印的速度也会快很多。这个多头并联3D彩打能申请专利么?算俺先提出来的哦!
融化冷却现在是连续的,在打印过程中不能够中断
打印头应该是保持熔化态就行,靠熔融太的高分子材料的自身表面张力,液体高分子保持一个滴挂态,但不会落下来。打印的过程,就是在指定的坐标点,打印头轻轻加压,挤出一个液滴,并与下部打印好的部位实现接触,靠自身重力和表面张力,使固定量的液体被转移下来。不过这个时候可能会有拉丝的问题,如果不能让打印头上的液体高分子材料和打印完成的点位断开的话。高表面张力加低粘度应该有助于避免这个问题。比如用蜡的话,肯定是不会拉丝的。打印头的材料选择也会有帮助,如果打印头的针管对打印材料不浸润,那么也会阻止拉丝的发生。
由于打印每一层的时间较长,液体高分子材料有充足的时间冷却成固体。(高速打印的话,可以在打完一层后加一个吹风动作,来保证冷却完成)。
雕刻机一工作粉末四飞,用的多了,屋子里什么东西上都是一层灰,你们海外有条件搞车库工厂的也许不在乎这个问题。但一般国内家庭就不行了,肯定被家里负责打扫卫生的领导憎恨。
凭经验也能猜出个大概来,3d打印机的拉丝是个比较难搞的问题,尤其是自己DIY的时候。。。
本来想说说3d printer的历史,看了一下wikipedia 的3d printer 部分,其实人家已经把这部分讲的很清楚了http://en.wikipedia.org/wiki/3D_printing。 我就不再发明一遍轮子了。 今天主要科普一下3d打印机的构造,特别是机械传动部分。这一块我写起来实在是有点勉为其难。本人是纯电子计算机背景,这块基本是完全不懂,因为DIY的缘故,硬着头皮看了一点点机械科普的东西,了解程度应当是皮毛也算不上。好在3d打印对机械精度要求不高,加之现在组件化标准化的产业也很成熟。 就我目前了解的,写点常识性的东西,有错误,还请高人指正。
顺便贴一张开源打印机的谱系图, 这个图已经很复杂了,但仍然不全,
现在小作坊/工厂/个人设计出品的3d打印机数量应当以数百计。

说3d打印机的结构可以从开源打印机的第一代说起reprap1.0
darwin, 就是下面这张图的样子
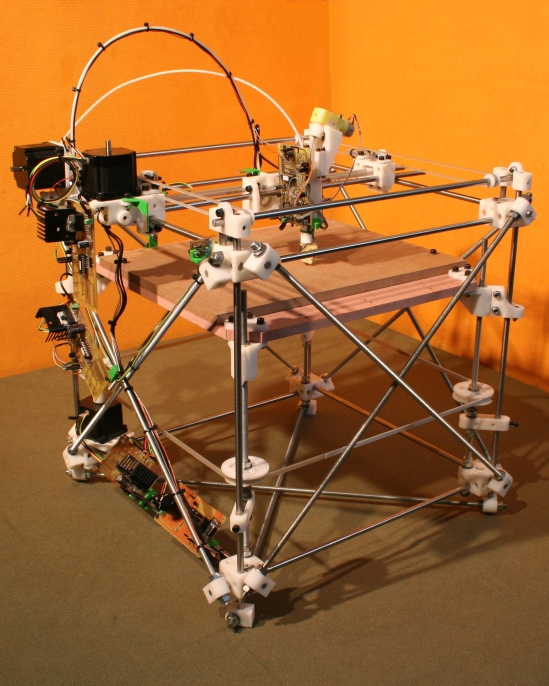
粗看起来可能挺吓人,其实没那么复杂,最外面是个立方体样子的框子,中间那一块木板是打印物体的支撑平台,这个平台四个角都架在螺杆上,摞杆靠皮带带通,同步旋转,这样平台就可以保持水平的基础上升降。 上面那个是打印头,可以水平方向做平面运动,打印头的水平运动和平面的升降结合起来,最终形成3维的物体。 因此一个3d打印机的结构,主要是有支持这三个方向的直线运动机构。 reprap的打印机看起来都挺复杂,是因为设计者的初衷就是想让机器能够复制自己,因此希望各个组成部分都可以通过3d打印得到(仅仅是理想,实际还差挺远)。因此设计了光杆框架结构的支撑。从实用性上来讲,这种框架结构,首先对装配调结的要求就很高,其次,主要部件包括电路板都外露,像个半成品。
因为方形的结构的稳固性和调整困难,第二代reprap 改成了三角框架结构

这种框架结构下,打印头可以在水平一个方向运动,同时能在垂直方向运动,支撑平台不需要垂直运动了,只要在另外一个水平方向上运动,组合起来就能实现三维的运动。这里可以看出三维打印机机械设计的原则,把三个方向的运动分解组合实现。
因为reprap的机器设计的不像成品,限制了其使用范围,reprap团队的成员参与创办了另外一家公司,就是目前很火的makerbot。 makerbot 用切割过的木板做壳体,取代了简单的框架结构,做出来的打印机有点像商业产品了,比如下面这个第一代

makerbot后面的版本逐步改进机械结构,第二代增大的打印尺寸,提供了自动传输带方式的连续打印,第三代引入了双打印头。昨天刚刚推出的第四代,全面更新了软硬件,引入了金属框架,而且。。。不再开源了。。。
其实支持三维的直线运动有更为简洁的设计,回复里有同学提到雕刻机,确实从功能上讲完全可以。 但因为3维打印机的特点,雕刻机的结构也不是完全合适。 支持直线运动的传动方式主要就是螺杆,和皮带两种,螺杆的精度比皮带高,载荷也大,但速度低一些。三维打印机的打印头基本不受力,对载荷没有要求,打印机的运动特点时,在水平两个方向上速度越快越好,在垂直方向上精度越高越好,速度无所谓(打完一层才动一次)。因此打印机的传动设计一般都是在水平方向使用皮带(同步带),垂直方向用螺杆。这和雕刻机相比,稍有不同。
既然是三个方向上的运动,那框架设计就可以不拘泥于以上两种,实际上各种设计也百花齐放,层出不穷。个人比较喜欢的是以下两个,
Eventorbot

第一个打印机设计的很简洁,用一条方钢就做出了框架,而且电路和传动机构基本隐藏起来,机器看着就比较美观了,下面是设计文档的链接:
http://reprap.org/wiki/Eventorbot
第二个打印机Rostock使用了delta三角结构,看上去很有科技感,建议感兴趣的同学去youtube上搜视频看看,非常酷
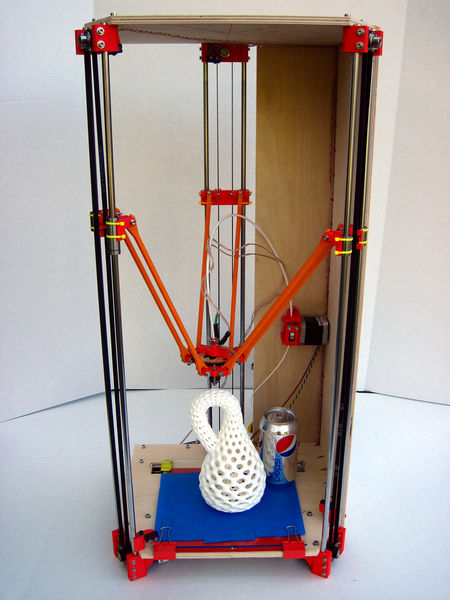
这个打印机的工作方式有点像机械臂,不同于传统的平面三维运动,创意十足。设计文档链接如下
http://reprap.org/wiki/Rostock
写到这里需要吐槽一下,国内也有出三维打印机的厂家,但打着diy旗号的都是拷贝人家的设计,没有看到那家有自己的独到想法,这种差距,这也许需要很多时间才能补足。
补充:这一部分写的比较简陋,因为机械传动确实不是很懂,只能看个热闹。 个人理解,目前的3维打印机对机械精度的要求不是很高0.1mm的传动比较容易达到。因此各种想法都可以尝试。下面这个设计tantillus甚至抛弃了传统的传动轮和皮带,用绕在轴上的钓鱼线来做传动,效果竟然也很惊人。。。
http://www.tantillus.org/Home.html


下一次说说塑料挤出机构
本帖一共被 1 帖 引用 (帖内工具实现)
可能是因为混合材质的热物理性质不同,还有就是在更换打印头的时候,两种材质的相容性比较难处理。
便宜,精度高
材料的兼容性应该很容易解决,选用同样的聚合物材料,加入不同的染料就是了。觉得机械上的难度大些,如果是5个打印头个管各的,那么空间安排上每个打印头都必须要避开其他的,所以每个打印动作很可能就必须是三维的,不容易操作。简单的话可以让5个不同颜色的打印头一字儿排开,每次只有一个工作。不过那样做的在速度上比单打的就没啥优势了。另外除了基准颜色以外的配色只能在纵向的一层层之间做,估计打出来的复合色会很难看,混不匀。当然打每个的基准色应该还可以。
瞎猜而已。
比喻基本上能理解,但是具体的,似乎没发现这个45度角的意义和局限。
我的理解,是圆形的最上面,和最下面部分都违反了45度原则吧。另外,你说的垂直孔,是类似一个水管平放时,水管截面是垂直孔么?
为什么是最下面架桥?如果是六边形,那实际上没有任何地方违反45度原则啊。
桥墩这个好理解,凡是不太稳固的,下面都可以加个松散的桥墩来支持。
我想我的困惑可能是在于,3D打印的时候,被打印的物体位置是不是固定不能变的?否则打个球的话,把球转动一下就可以避免45度限制。
这个也是比较难得。
你说的东西看上去挺有意思,方便的话,不妨另外开个主题写点详细一些的。