主题:【原创】化工过程控制的实践 -- 润树
家园 【原创】4.过程静态最优化(PSSO) 在MPC一章里,出现了动态和静态优化的概念,也就是根据MPC的线性模型来计算过程最佳静态操作点和到达此点的动态途径。但是由于其模型没有全面地(MPC的变量只是过程所有变量的一部分)和准确地(忽略了过程的非线性)反映过程的特性,只能说它是一个片面/局部和近似的优化。
所谓过程静态优化(PSSO,process steady state optimization)则是一个远在MPC之前很久就出现了的古老命题:
给定过程的目标函数 J = f(x1, x2, x3, ……, xn),在x的约束条件下,找到优化变量x1, x2, ……, xn的值,使J最大化或最小化。
传统上,有两种方法来实现PSSO,一是通过过程的数学模型来计算(模型法),二是在线搜索(搜索法)。模型法中用到的模型,既可以是基于第一原理的机理模型,也可以是经验模型,或两者的结合,在MPC之前,大多是离线实现。也就是说,通过人工或计算机的计算,找到最佳静态操作变量的设定值,然后手动改变这些变量来实现优化。有了MPC后,PSSO所计算出的最佳变量设定值通过这两个系统间的接口传递到MPC自动实现。因此,PSSO可看着是位于MPC之上的一级控制系统。而在线搜索法则是直接改变优化变量的设定值,然后观察目标函数的变化方向,一步一步地去逼近最大/最小值。
最优化,从本质上说是一个数学问题,我们在高等数学中都学习过了。对于线性和低阶的目标函数和约束条件,可以用求导数和代数的方法来求解,而对于高阶和非线性的目标函数或约束条件,则需要用到更复杂的数学方法,像单纯型法,非线性最小二乘法(NLLS)non-linear least squre),分步二次规划(SQP,sequential quadratic programming),总体降梯度法(GRG,generalized reduced gradients)等等。MATLAB之Optimization Tool Box是用来求解此类问题的好工具。但这里我们不对这些数学方法作进一步的讨论,而将焦点放在过程优化的含义及其具体的工程实现。
我们先来看一个精馏塔。如图4.0.1所示,这个塔的操作目的是将进料中的二元主分Ca和Cb分离成塔顶的轻主分和塔低的重主分产品。一般地,这个分离过程是非理想的,即塔顶会有重主分杂质Xb,而塔底也有轻主分杂质Xa。现在的问题是,怎样的分离才算经济上最优。
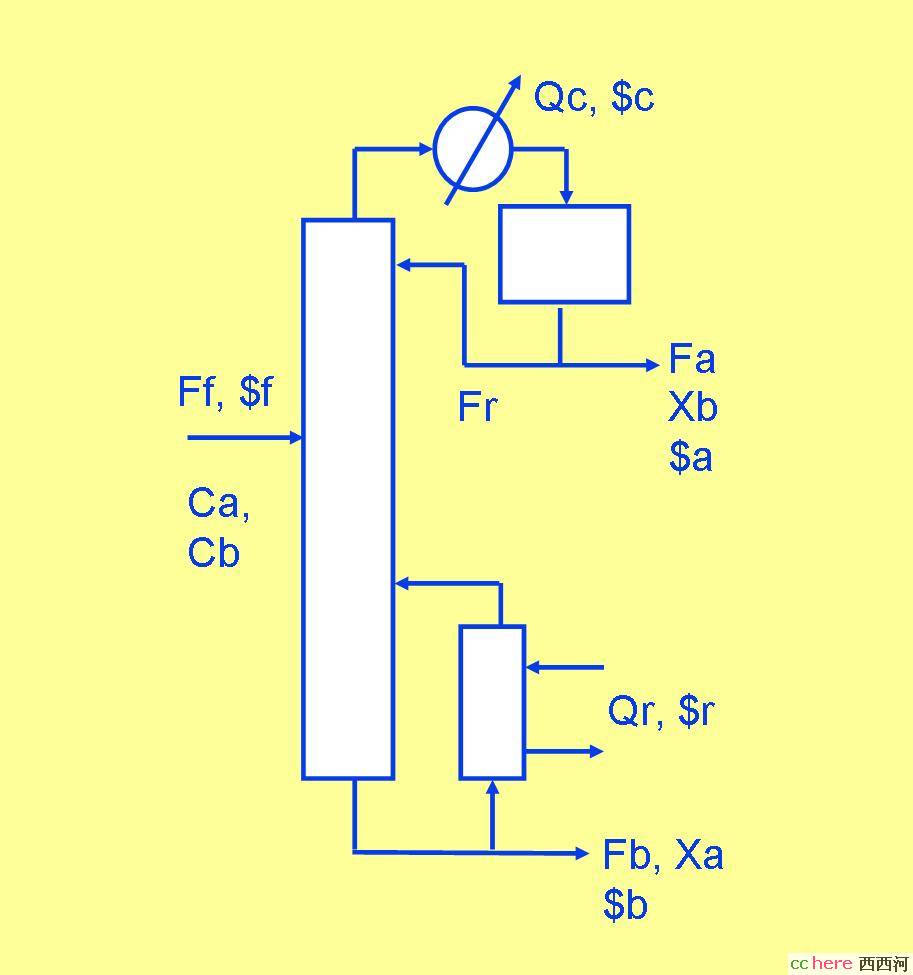
图4.0.1 二元精馏塔的分离示意图
我们可以定义这个过程的优化目标函数如下:
J = 产品所得 – 原料成本 – 能源成本
= Fa*$a + Fb*$b - Ff*$f - Qc*$c - Qr*$r (1)
式中,
Fa和$a – 塔顶产品流量和价格
Fb和$b - 塔底产品流量和价格
Ff和$f – 进料流量和价格
Qc和$c – 冷凝量和价格
Qr和$r – 再沸器热量和价格
约束条件是:
塔顶和塔底的杂质主分小于产品指标值 Xa <= Xa_spec, Xb<=Xb_spec (2)
冷凝器和再沸器能量受限于最大设计值 Qc <= Qc_max, Qr <= Qr_max (3)
由该塔的物料平衡,我们可以得到:
塔顶产品 Fa = Ff (Ca-Xa) / (1-Xa-Xb) (4)
塔底产品 Fb = Ff (Cb-Xb) / (1-Xa-Xb) (5)
对该塔的能源消耗,我们有经验公式:
冷凝量 Qc = Ff (c1 + c2*Xb + c3*Xb*Xb) (6)
再沸热量 Qb = Ff (d1 + d2*Xb + d3*Xb*Xb) (7)
将(4)-(7)代入(1),可得
J = f(Ff, Ca, Cb, Xb, Xa, $a, $b, $c, $r) (8)
在给定Ff, Ca, Cb, $a, $b, $c, $r的情况下,(8)式中只有Xa和Xb是优化变量,而如果塔底产品价格高于塔顶产品价格,即 $b > $a,那末Xa应控制在其上限(低价值组分作高价值产品),就是所谓的卡边操作。这样就只剩下唯一的优化变量Xb,可以很容易的算出它的优化值是15%,其对应的最大值J是$1006/小时。既然b主分价值高于a主分,为什么不尽量将这个数值控制在最小值呢?这是因为,要获得那样的结果,就需要加大回流量,导致冷凝量和再沸热量的消耗都上升,而抵消或超过由更多的塔底产品所带来的经济利益。图4.0.2是用MS Excell计算的图像显示。顺便说一下,MS Excell里的Add-Ins Solver也可以方便地用来求解复杂的优化目标函数。
 外链图片需谨慎,可能会被源头改
外链图片需谨慎,可能会被源头改图4.0.2 优化分离的图像显示
这个例子很间单,旨在用来说明化工过程中优化概念。实际的情形要复杂得多,我们将在下一节用Aspen Plus 的Real Time Modeling and Optimization来详细考察。
这里提出一个数学上臭名昭著的Banana函数优化问题,有兴趣者不妨用MS Excell里的Solver去求解一下。当然用其它方法也可以。
J = 100*(X2 – X1^2)^2 + (1-X1)^2
求解J的最小值,无约束条件。^2是平方算子。
家园 请教下列公式的来源和物理意义 塔顶产品 Fa = Ff (Ca-Xa) / (1-Xa-Xb) (4)俺怎么看都没有琢磨透公式的意思。塔底产品 Fb = Ff (Cb-Xb) / (1-Xa-Xb) (5)
家园 我应该给出推导过程 即该塔的物料平衡方程:
设 Ca = 进料a组分,Cb = 进料b组分,Xa = 塔底a组分,Xb = 塔顶b组分
有 Ca + Cb = 1, 塔顶a组分 = 1 - Xb,塔底b组分 = 1 - Xa
进料流量等于塔顶流量加塔底流量:
Ff = Fa + Fb
进料中的a组分量等于塔顶的a组分量加塔底的a组分量:
Ff*Ca = Fa*(1 - Xb) + Fb*Xa
将Fb = Ff - Fa 代入上式,可得
Fa = Ff(Ca - Xa)/(1 - Xa - Xb)
进料中的b组分量等于塔顶的b组分量加塔底的b组分量:
Ff*Cb = Fa*Xb + Fb*(1-Xa)
将Fa = Ff - Fb 代入上式,可得
Fb = Ff(Ca - Xb)/(1 - Xa - Xb)
家园 太谢谢了! 老师讲课能够像您这样,学生就大发了。
在此谢谢!
家园 这个需要点化工基础 看不懂就算了吧。

润树这个系列不是大众科普,是给相关行业专业人员介绍控制入门。
家园 0.618 在这里用不上了

家园 【原创】3.2 太极自适应模型预估控制* 从本章前面的叙述我们可看到,MPC的实施远非一件易事,除了要求实施者具有全面的过程和MPC知识外,步骤也比较复杂。太极模型预估控制器的面市,就是试图将MPC的实施尽可能的简单化和程序化。
太极控制(Tai-Ji Control)是设在荷兰的一家自动控制系统软件开发公司,由朱豫才博士创立。该公司开发出的太极模型预估控制系统,将(1)过程测试,(2)模型辨识,(3)控制器参数设定,(4)仿真,(5)在线控制这五大功能,全部集成在一个在视窗平台上运行的软件包里,其中(1),(2),(5)可连续自动实现。图3.2.1是该系统的人机界面。与之相比较,目前Aspen 的DMCplus,仍将这些功能分成五个软件包分步骤实施。

图3.2.1 太极MPC控制系统人机界面
太极控制的过程测试和模型辨识是基于多变量的渐进法,朱豫才博士在此领域有专著论述(《Multivariable System Identification for Process Control》by Yucai Zhu, Elsevier Science Ltd, Oxford, UK, 372 pages, ISBN: 0-08-043985-3,2000)。它的基本方法是,在控制工程师设定好控制器的控制变量(MV)以及它们在测试时的最大变化幅值,干扰变量(DV),和被控变量(CV)以及它们的稳态时间后,系统可在开环或闭环的条件下,以GBN(PRBS)模式输入激励信号对过程进行自动测试,并由获得的测试数据进行模型辨识。识别出来的模型按频率响应法的准则被分别标示出A, B, C, D四个品质等级,便于取舍。过去,做一个MPC项目时大约有30-40%的时间是消耗于这个过程,而且形目的成功与否很大程度上取决于模型的品质,太极控制在这方面的开创性工作和成效,对于今后MPC在各工业界更广泛的应用,是至关重要的。
Tai-Ji MPC的设计思想是,在一个MPC项目实施时,只要工程人员在前期作出该MPC的结构设计和参数设定(design and parameterize,D&P),上述的(1)(2)(5)的所有工作可由该软件系统连续自动完成。这样不但可以将目前一般要二至三个月的项目周期缩短到二至三个星期,而且实施过程接近于标准化,减低了人为因素带来的不确定性。这几项任务在Tai-Ji MPC中的实现分述于下。
结构设计和参数设定
这项任务须由对应用过程和MPC有相当了解的工程人员来完成。图3.2.2是控制器的结构设计表。在这个表里,工程人员必须决定哪些过程变量是MV和DV,哪些是CV,并设定它们的相关参数。

图3.2.2 太极MPC组态表
图3.2.3是控制矩阵的预期表,即工程人员根据自己的过程的认识,预先估计各模型的增益方向,和确定哪些模型是不可能/不需要出现在该矩阵之中。这样做有利于减少建模计算量,提高模型精度。

图3.2.3 太极MPC控制矩阵预期表
图3.2.4是系统自动产生的MV激励信号。这些信号是并行的,可连续不间断产生,大大提高了测试效率。

图3.2.4 太极MPC过程测试时的MV激励信号
过程测试和模型辨识
图3.2.5是辨识出来的过程模型。其中标示为A,B级别的,可直接用于控制模型矩阵之中,而C,D级别的要么表明它们不重要,要么还需要修改测试计划,作进一步辨识。同时可以对辨识出来的模型进行仿真,观察模型预估值与实际值的拟合程度,如图3.2.6所示。

图3.2.5 太极MPC辨识出的过程模型

图3.2.6 模型预估值与实际值的拟合程度仿真
如果测试是在闭环的状态下进行,辨识出来的A,B等级的模型可立即投入闭环控制。因此,当所有的模型都达到品质要求时,控制器的在线闭环控制试验也完成了。
太极控制目前还在开发自适应的功能,组成一个“控制 -- 监测 -- 辨识”的闭环系统。它的目标是,用一个在线监测的模快来评价MPC的闭环控制品质,当该品质降低到预定指标时,系统将启动辨识模块,对过程重新进行辨识,使控制器自动适应过程的特性变化。
有关太极控制的详细资讯,可参见以下链接:
*获朱豫才博士同意,本篇材料均取自他和太极控制发表的相关文章,特别致谢。
家园 菜单上有个小错 expotr model,应该是export model。看来是朱博士自己写的。这个公司好像也不大。



